I wanted to create a autonomous boat because I had no experience with any water vehicles.
I started by designing my own fuselage shape, or whatever that part is called 🙂
I chose the length of 1 meter because I love whole numbers and because this is the maximum size that fits in the bath for testing.
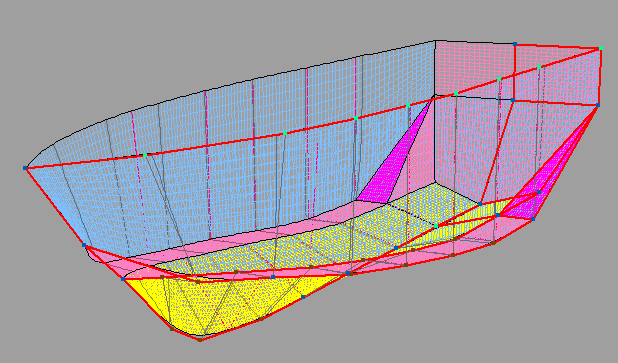
Here’s what i got. I don’t understand anything about hydrodynamics. I designed it solely by intuition, perhaps this boat is not efficient at all.
I calculated the displacement to be 8kg, because at the time I thought that I would use large and heavy lead-acid batteries.
The software for designing boats makes the unfolded flat pieces to be cut later.
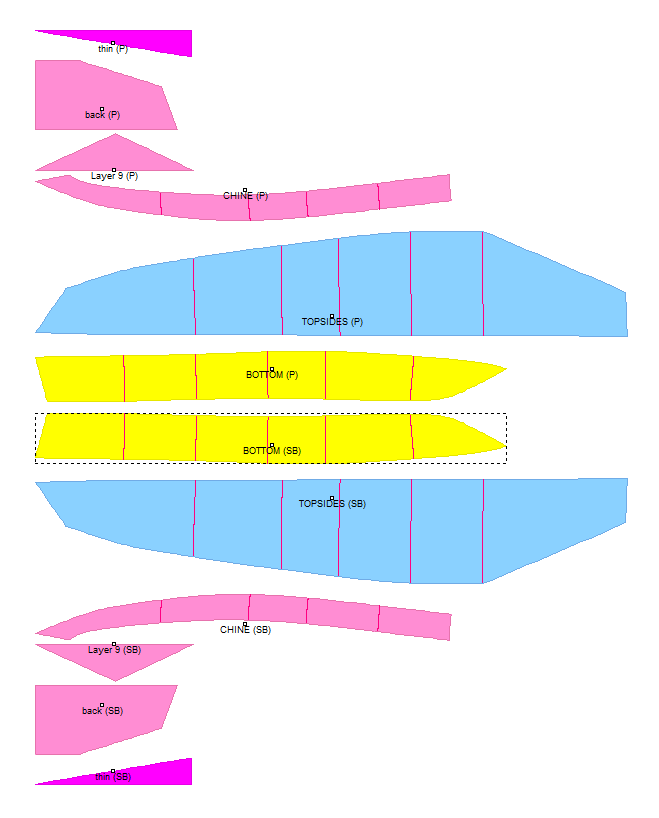
I glued those flat parts together out of clear PET sheets


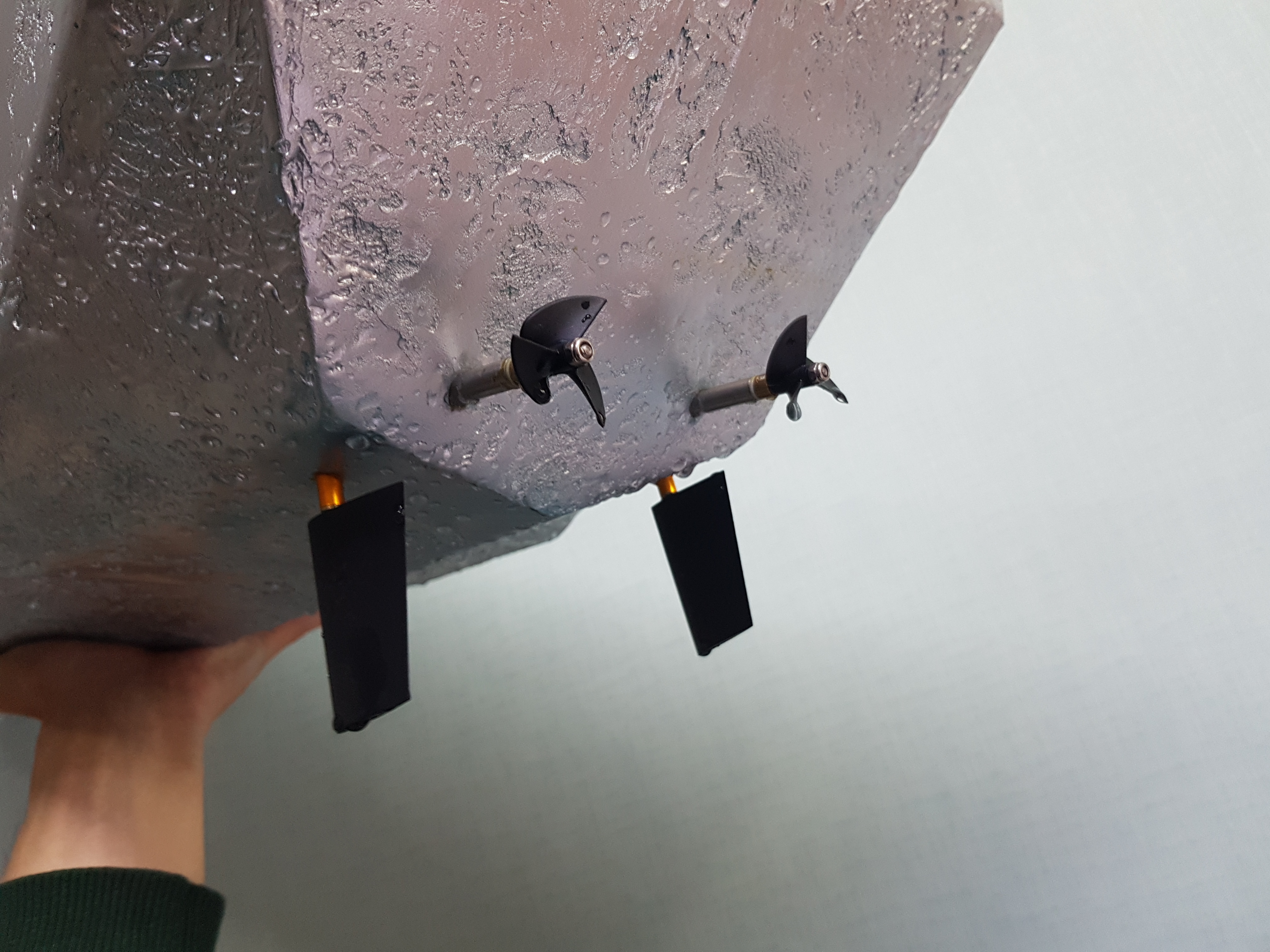
And now begins the most difficult part for me, making the body of fiberglass. I have never worked with this material, learned a lot in the process.


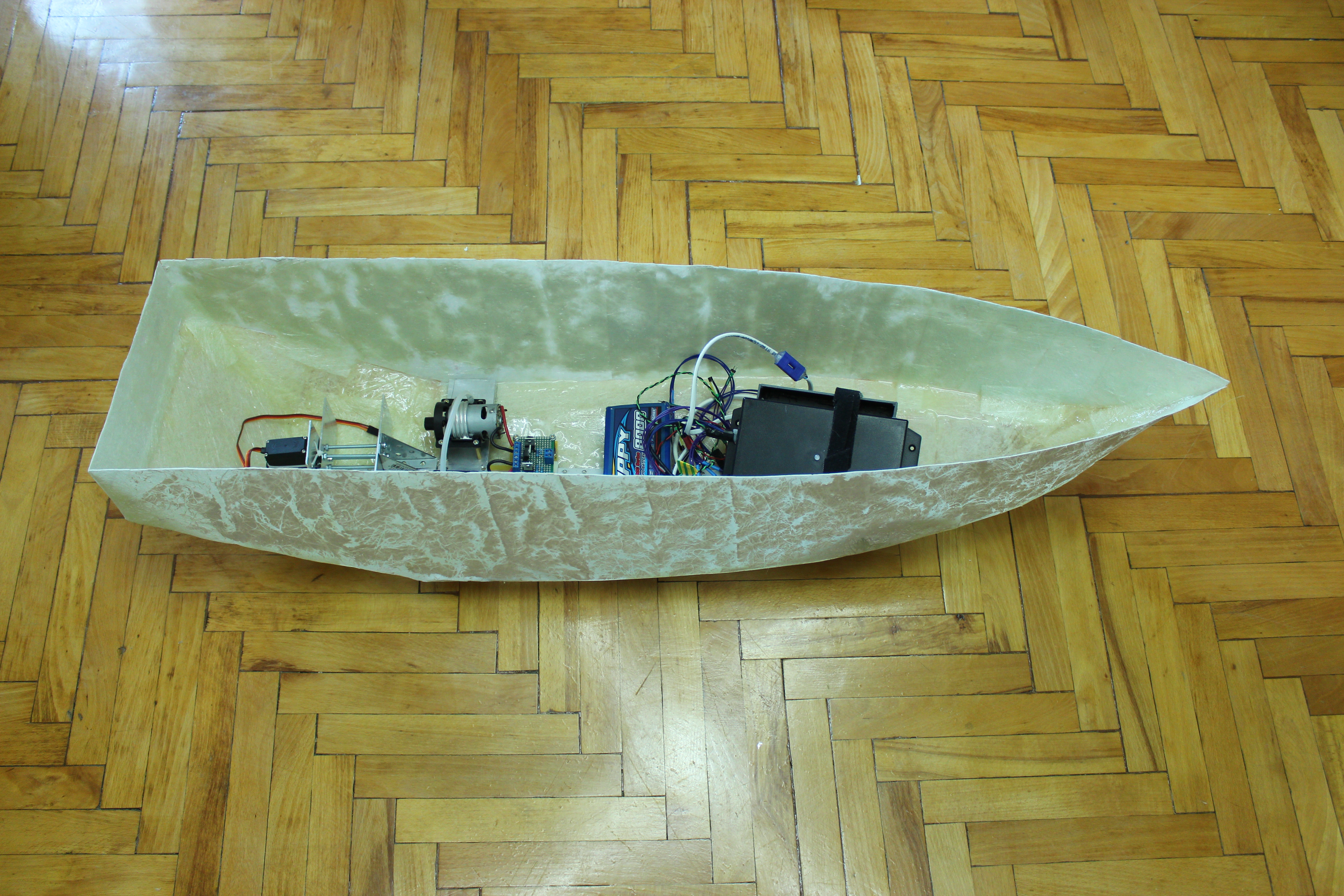
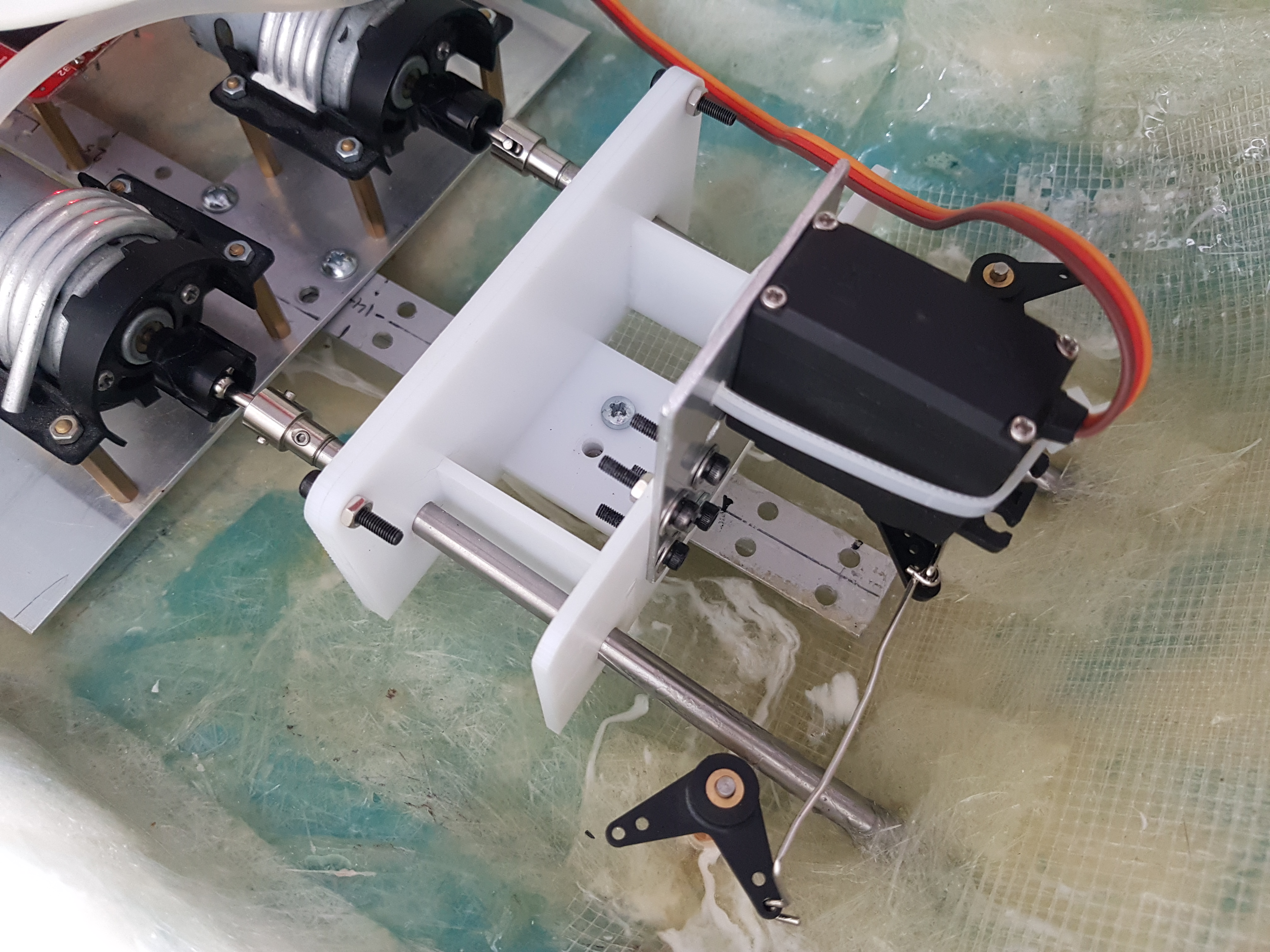
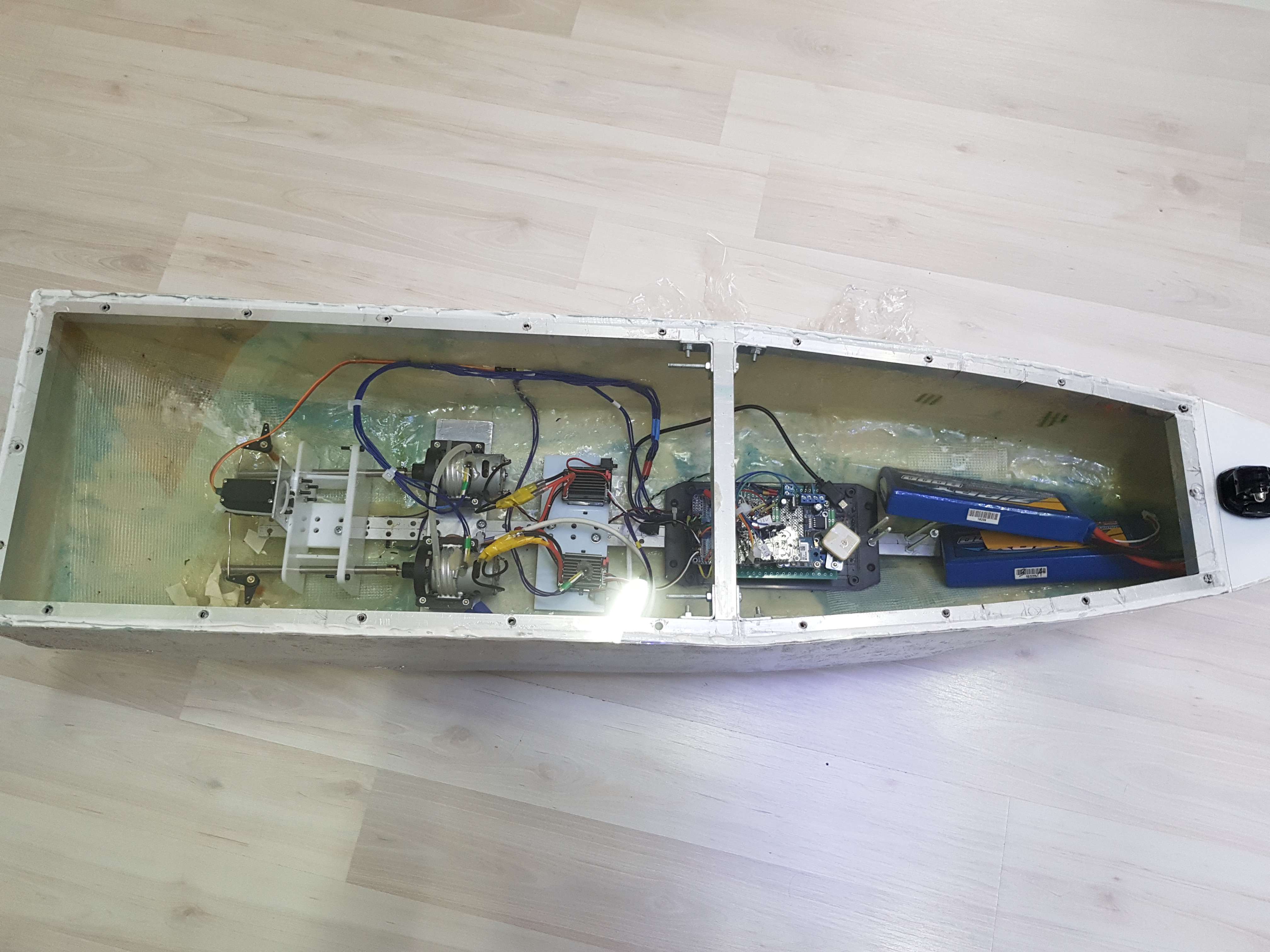
When the hull was ready I glued in a holed aluminum tee to serve as the center rail to which everything is attached. It was a great decision.

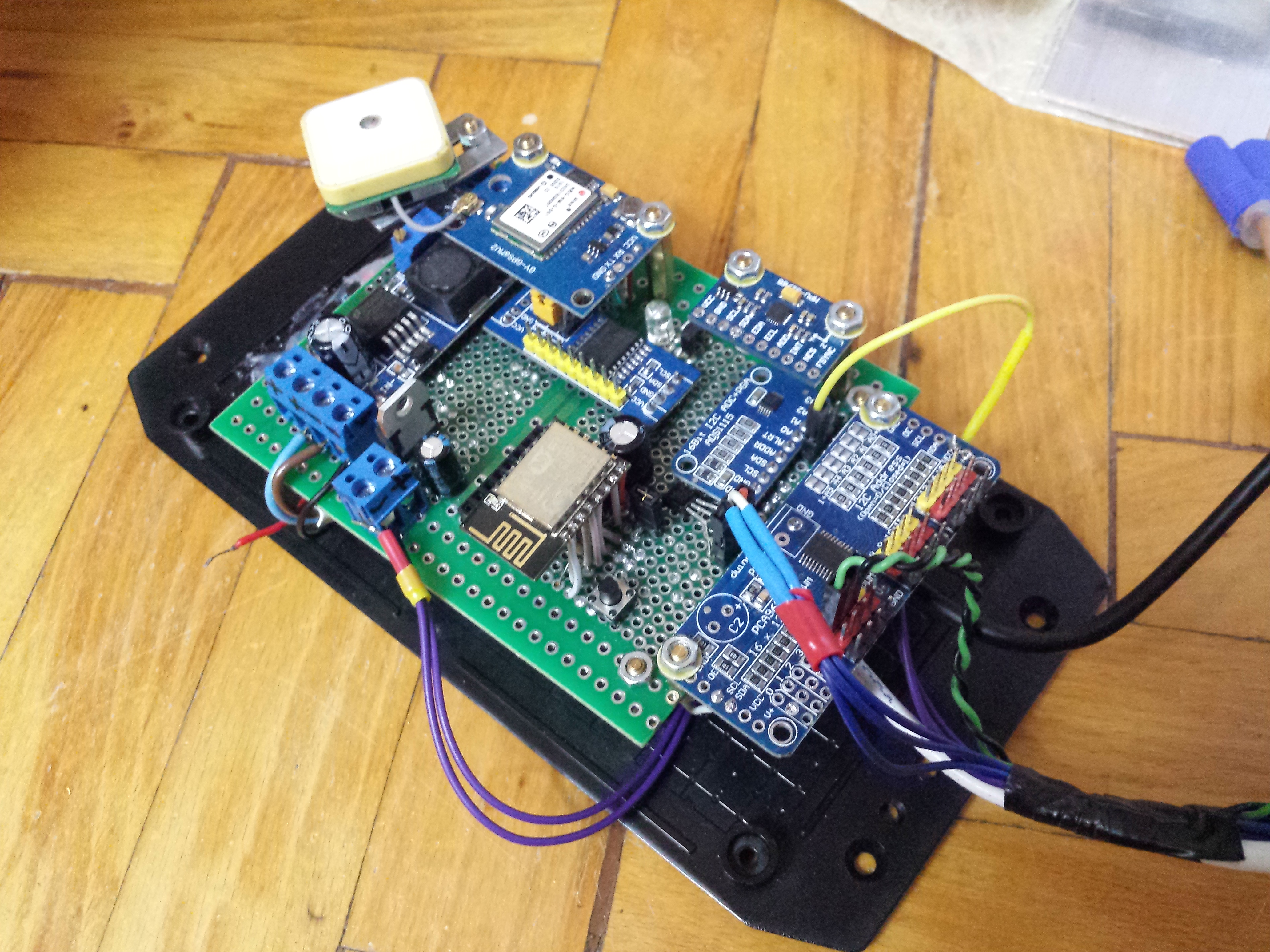
While the resin was curing, I was developing electronics. I wanted to do everything myself from scratch.
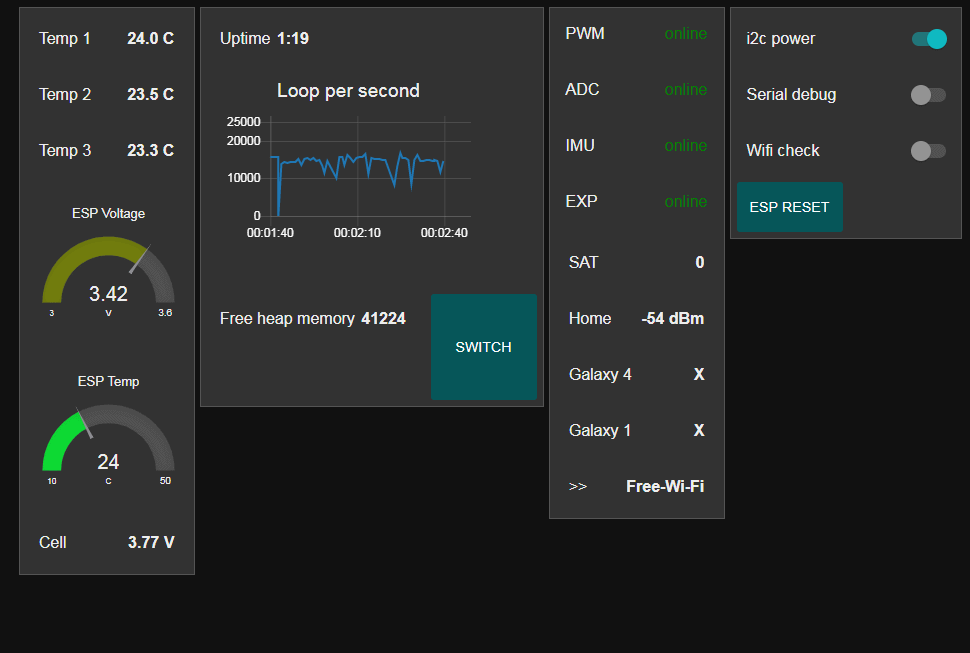
The board is powered by ESP8266, has an external ADC, GPS, accelerometer, gyroscope, leakage sensor, 5 temperature sensors, external PWM module on board.
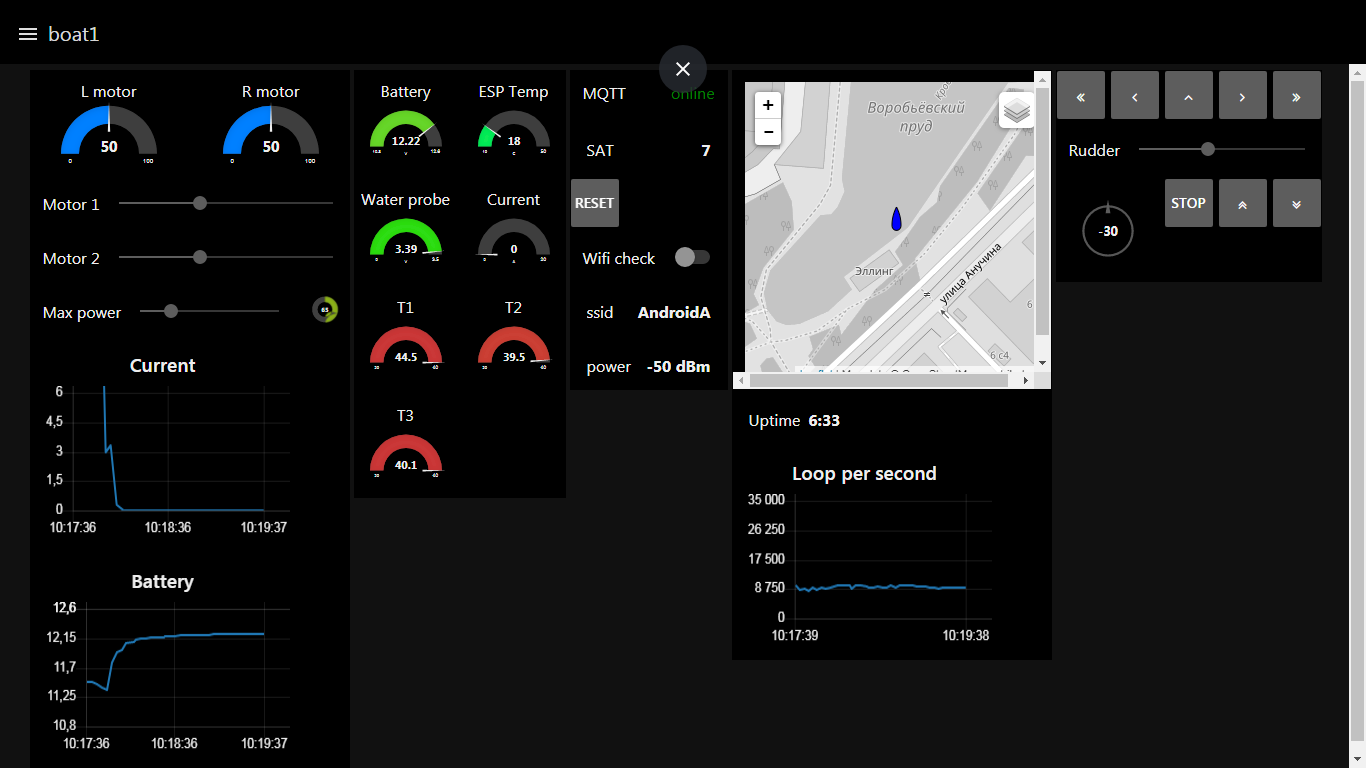
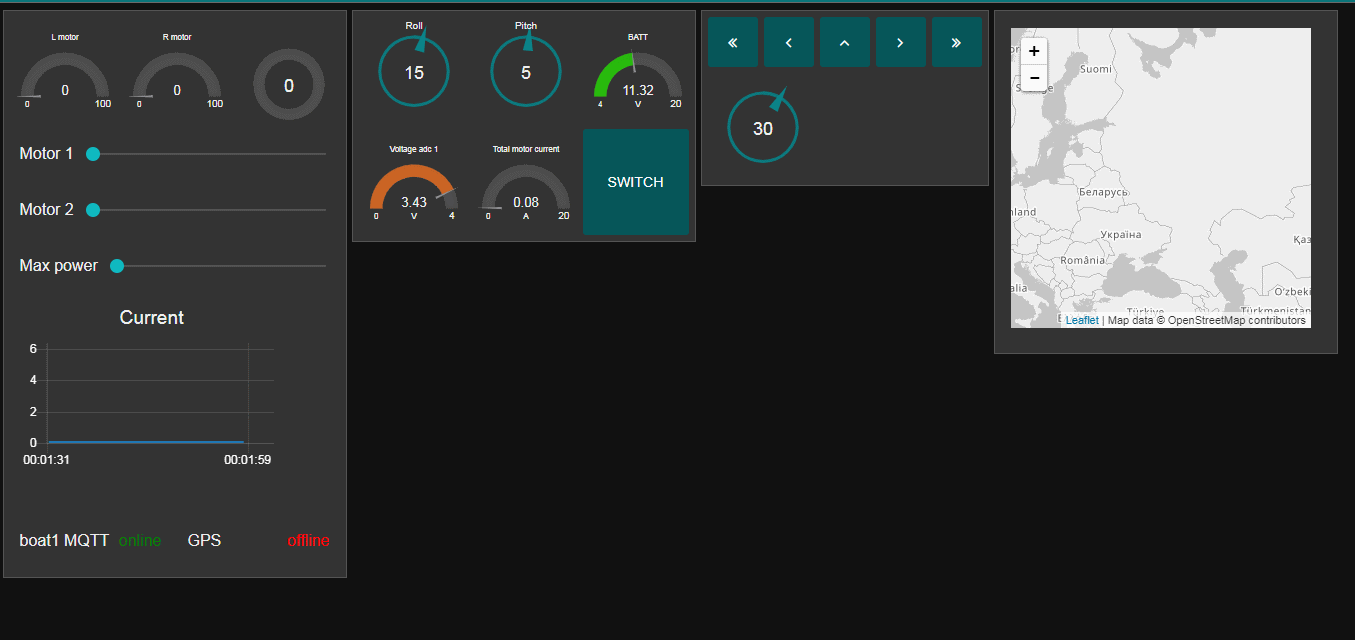
This took more time than I wanted. Even more time was spent on writing software. I had to make software for this board and also for the server part, which runs on a remote linux server for remote control and visualization.

The server side runs on Node-red. It allows you to monitor all the parameters of the boat.
I installed square aluminum tubes on the top for strength and where to attach the top cover.


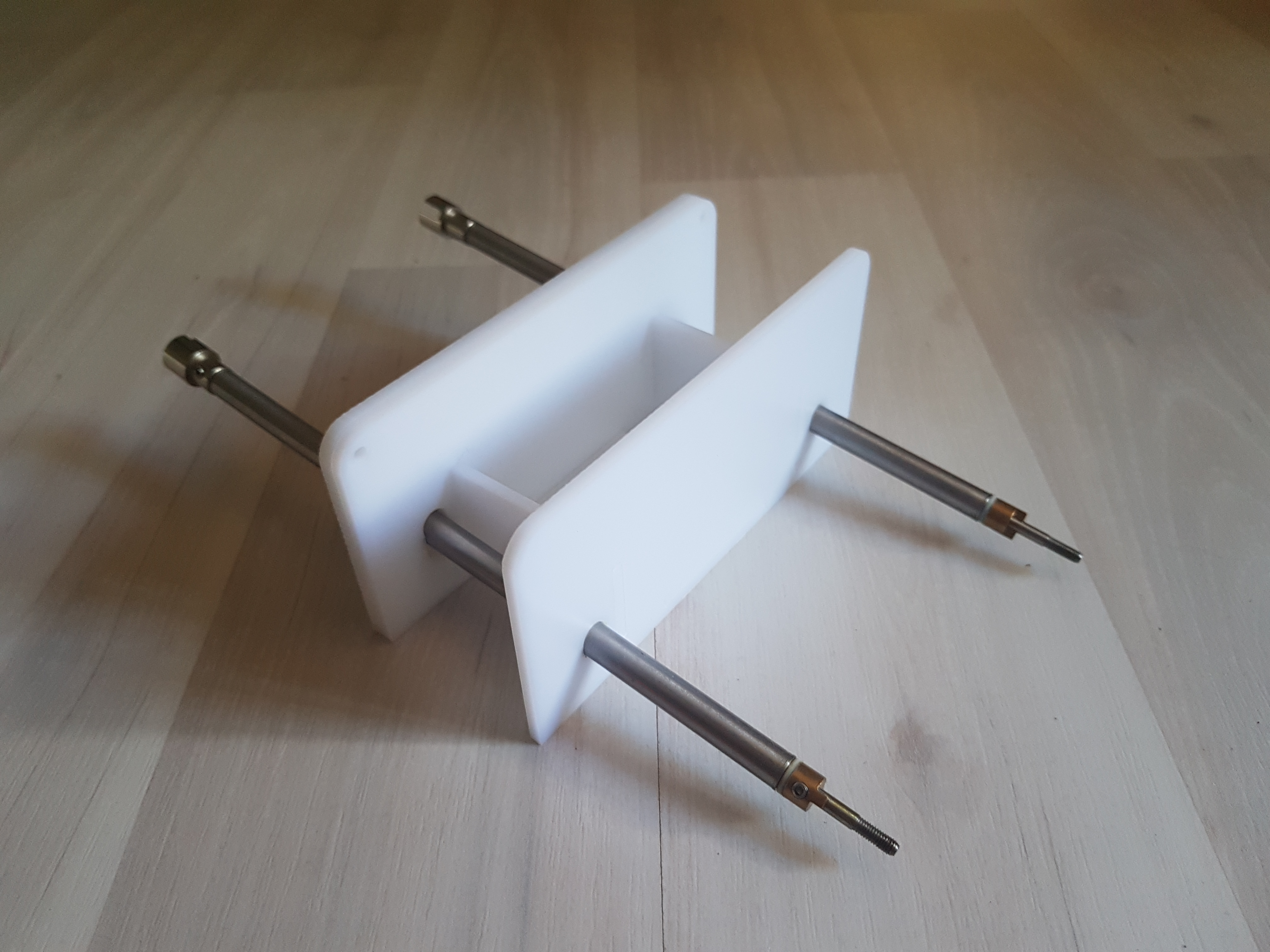
This rail was a great idea, thanks to it I could mount anything in any place, I could change the position of the engines to find the optimal place.

In this photo, the top cover is closed! You can’t see it, but it’s there. Thin transparent PET plastic.


The old Samsung cellphone is inside the boat. It acts as wi-fi hotspot so the boat can have internet connection